|
I am a PhD Candidate in the Robotics Engineering prorgam at Worcester Polytechnic Institute (WPI) where I work on shared autonomy and assisted driving for mobile robot navigation. I obtained my Masters degree in Robotics Engineering from WPI in May 2018, where I worked as a research assistant on a WPI-Toyota Research program on building an integrated active driver simulation framework for investigating human-vehicle interaction in semi- and fully-autonomous vehicles. I am passionate about STEM education and have worked on several programs such as: Pan-African Robotics Competition (PARC), Cobots For Kids and Maths and Science for Sub-Saharan Africa (MS4SSA). Email / Resume / Google Scholar / LinkedIn / Github |

|
|
|
|
(Ongoing Project) Defining human-compatible social navigation constraints is complex. We leverage data-driven approach to learn the task constraints from expert (human) demonstrations. |
|
Enabling safe and intuitive assistive navigation of telepresence robots using haptic feedback and reciprocal velocity obstacles (RVO) |
|
Kenechukwu C. Mbanisi, Hideyuki Kimpara, Michael A. Gennert, Zhi Li In internal review video Novel application of imitation learning algorithms to model natural driver control behavior from human demonstration |
|
slides / project page Applied end-to-end learning approach for dynamic collision avoidance of an autonomous mobile robot using Deep Q-Learning and DDPG algorithms. Collaborative work with Abhishek Jain, Kavit Nilesh Shah and Sanjeev Kannan |
|
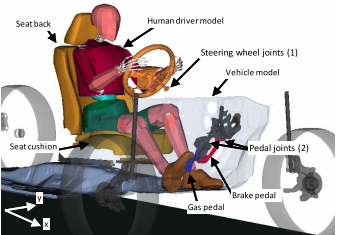
Hideyuki Kimpara, Kenechukwu C. Mbanisi, Danil Prokhorov, Jie Fu, Zhi Li, Michael A. Gennert IEEE Transactions on Intelligent Transportation Systems, 2020 paper Proposed a novel model-based active driver simulation framework for investigating human-vehicle interaction in semi- and fully-autonomous vehicles |
|
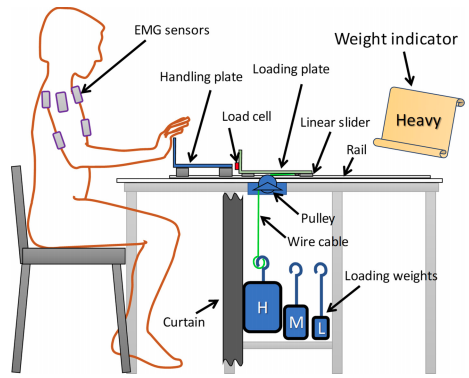
Hideyuki Kimpara, Kenechukwu C. Mbanisi, Zhi Li, Karen L. Troy, Danil Prokhorov, Michael A. Gennert Human Factors, 2020 paper This work investigates the effects of human force anticipation on human motor control by conducting an experimental load-pushing study with diverse combinations of informed and actual loading weights. |
|
video / code / report We developed a mechanism to enable mounting a da Vinci Research Kit insertion tool on an ABB Industrial robot. Also, we developed software packages consisting of kinematics, trajectory generation and teleoperation functionality. Collaborative work with Yan Wang, Yuqi Jiang, Tianyu Cheng, and Abhijeet Thakan |

|
Kenechukwu C. Mbanisi, Hideyuki Kimpara, Tess B. Meier, Michael A. Gennert, Zhi Li IROS, 2018 paper We propose an integrated human-vehicle interaction simulation framework which learns vehicle maneuver motion primitives from human drivers, and uses them to compose natural and contextual driving motions. |
|
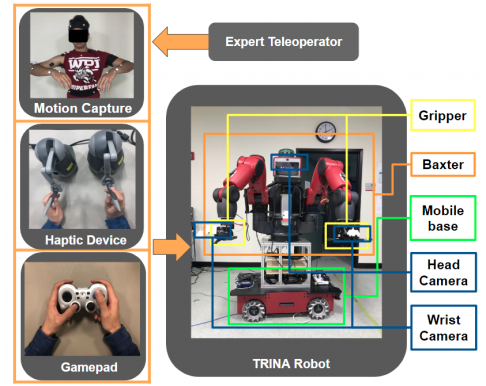
Kenechukwu C. Mbanisi, Alexandra R. Valiton, Renee K. Dorer, Zhi Li Poster presentation at IROS 2018 Workshop on Robotic Co-Workers 4.0 paper We proposed a study to evaluate teleoperation interfaces in the performance of complex motion coordination tasks on the basis of operator physical fatigue. |
|
|

|
In 2021, I am leading the advanced category (undergraduate & graduate teams) of PARC with a focus on developing navigation software for a autonomous delivery robot. Check the competition documentation for more details. |
|

|
This program aims at inspiring and training the next generation of robotics and advanced manufacturing workforce. With support from the ARM Institute and M2I2, we run 7-week programs for middle school students on using collaborative robots, CNC machines and CAD software. Paper abstract summarising our efforts has been accepted for ASEE 2021. |
|

|
I have served as a graduate teaching assistant for undergraduate courses such as Introduction to Robotics (RBE 1001), Control Engineering (ES 3011). I helped develop the robotics lab sessions for the control engineering course in Spring 2021. |
|
|
The program's goal is to improve quality of STEM education at secondary level across sub-Saharan Africa by empowering secondary school STEM teachers through training and access to resources. I served as a robotics curriculum developer and facilitator. |
|
Source code and style cloned from Jon Barron's website |